Empowering Transformers Spectrally: Towards Comprehensive Pattern Learning for Image Demoiréing
ICASSP 2026 - 2026 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pp. 10227-10231, 2026
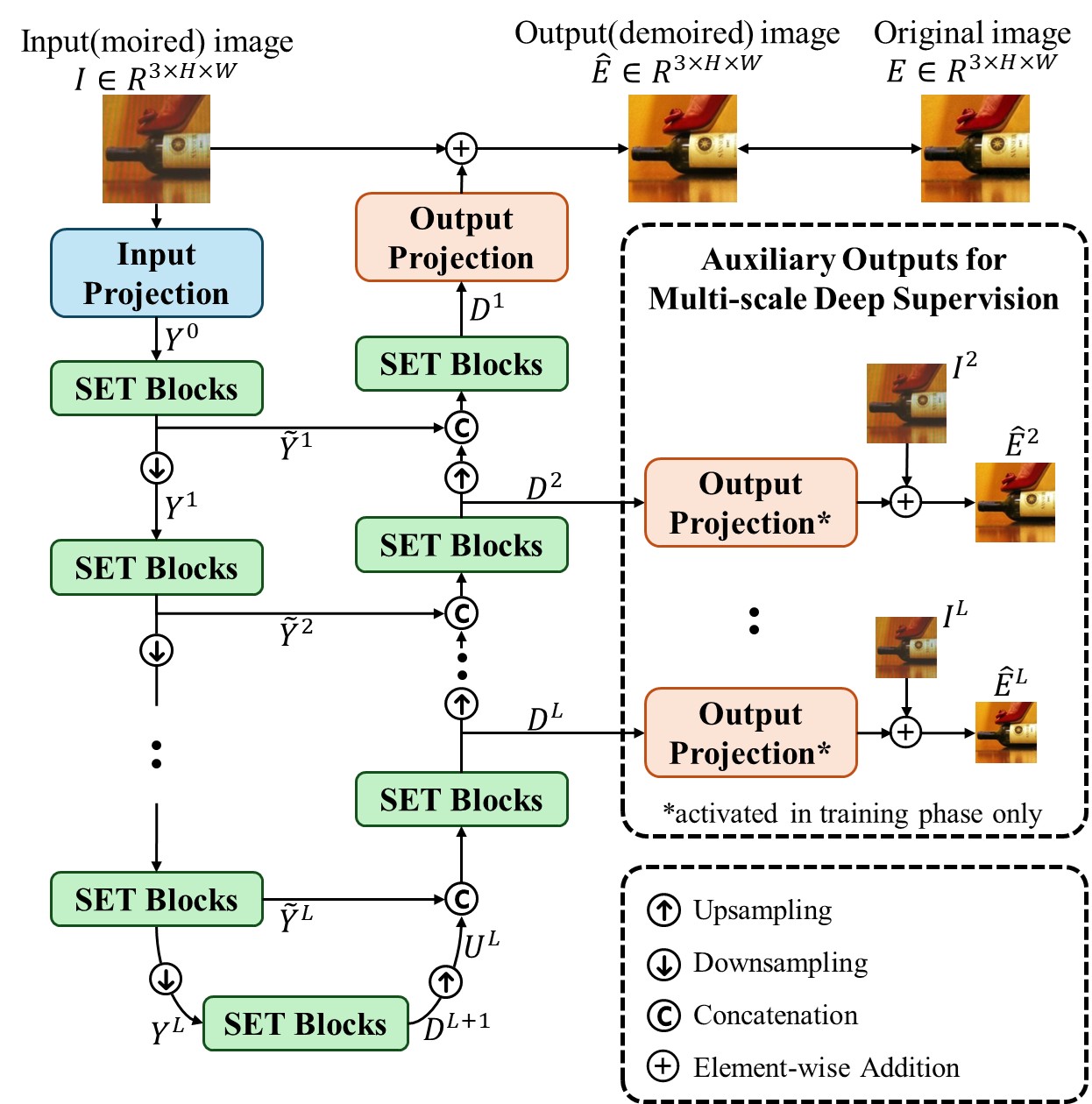
Digital screen photography frequently suffers from moiré patterns caused by frequency aliasing between camera sensors and display pixels. Removing moiré artifacts is challenging due to their varying color, shape, and scale. Existing methods primarily operate in the spatial domain and thus overlook crucial frequency-domain information inherent in moiré patterns. To address this, we propose Spectrally Empowered Demoiréing Transformers (SEDT), a U-shaped Transformer integrating a Frequency Domain Modulator (FDM) within each Transformer block. The FDM performs spectral filtering through learnable modulation of frequency components, such as channel-wise affine transformations and band-wise frequency masking, enabling effective extraction of moiré-related features across multiple scales and frequency ranges. Evaluations on the TIP-2018 dataset demonstrate that SEDT significantly outperforms existing state-of-the-art models in both PSNR and SSIM, highlighting the potential of frequency-domain enhancements in Transformer architectures for advanced image restoration tasks. The code is available at https://github.com/sylee-skhu/SEDT.